配線:
Arduino NanoをUSBASPプログラマに接続します (ArduinoISPは既存のplatformio.iniセクションではテストされていません。自分で記述する必要があります)
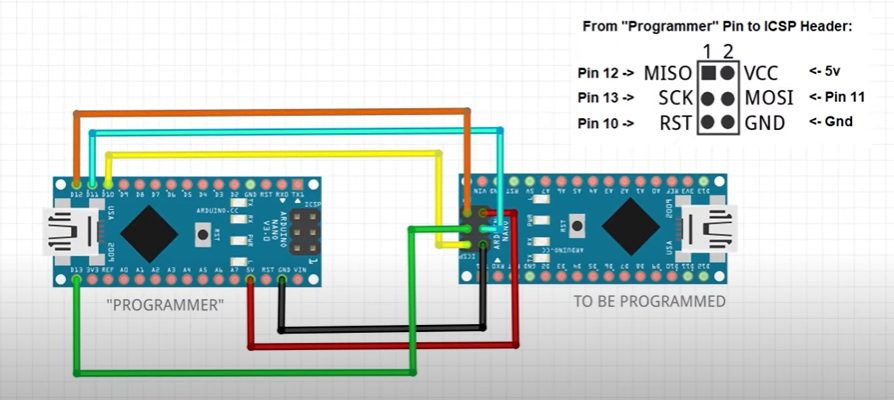
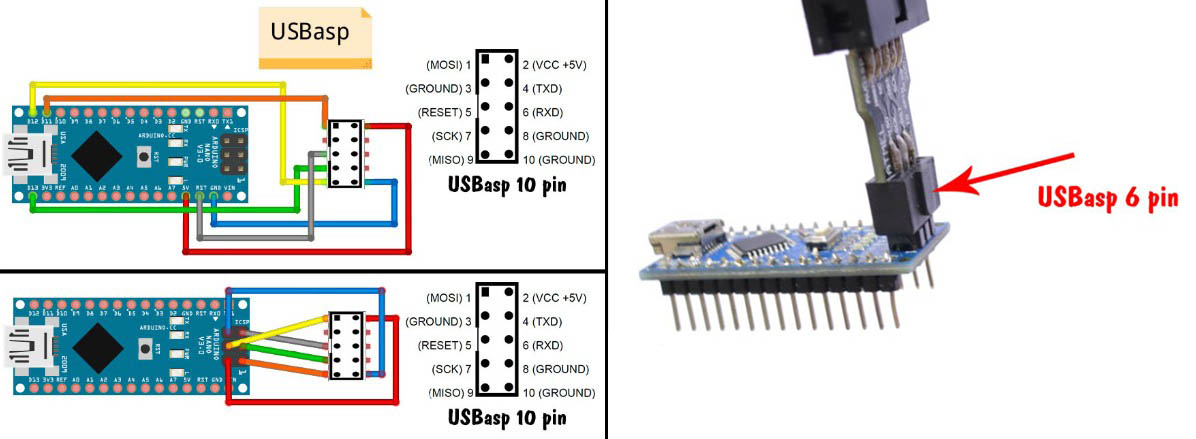
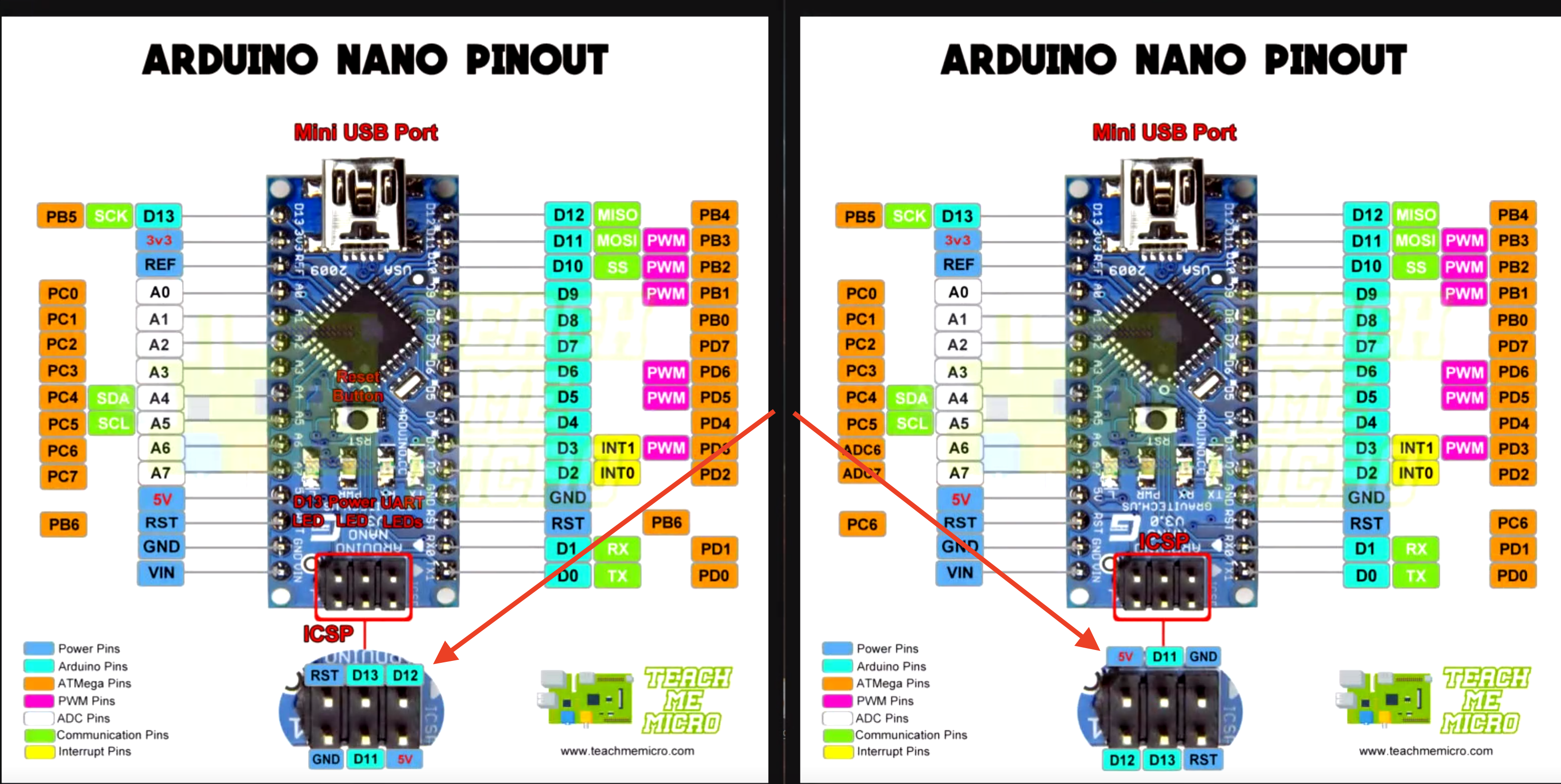
コネクタのピン配置は異なる場合があることに注意してください
コンパイルとファームウェア書き込み:
configuration.h
 configuration.hファイルでファームウェアを設定します。
configuration.hファイルでファームウェアを設定します。
コンパイルエラー
コンパイル時にファームウェアサイズがマイコンメモリサイズと合わないというエラーが発生した場合、通常は次のコマンドを順番に実行することで解決します
はかりモジュール数の選択¶
1. MiniCoreコアのファームウェア書き込み¶
USBASPプログラマが必要です
2.1 ヒューズの変更
2.2 EEPROMの書き込み¶
マイコンコントローラのファームウェア書き込み¶
オートPID (PID自動調整)¶
必要に応じて実行します
2段階で実行します: configuration.hで以下を設定します
手順2.3のファームウェア書き込みを実行します ファームウェア書き込み後、自動PID調整が開始され、完了するとディスプレイに「Прошей часть 2」と表示されますdefine AUTOPID_RUN 0に変更します¶
手順2.3を実行します
クーラーテストのファームウェア書き込み¶
必要に応じて実行します
configuration.hで次の行をコメント解除します
手順2.3を実行します すべての利用可能な周波数でクーラーテストが開始され、PWMデューティ比100-10%でディスプレイに動作モードが表示されます。テスト完了後、ノイズレベルとクーラーの動作品質に関する希望に基づいて、configuration.hで以下を設定します 希望の周波数を選択し、次をコメントアウトします手順2.3でマイコンを書き込みます
起動時エラー
ファームウェア書き込み後および動作中にディスプレイにエラーが表示される場合は、configuration.hファイルを確認してください
教育用ビデオ¶
ビデオへのリンク: