連接伺服馬達¶
伺服馬達是带齒輪箱和控制電子元件的小馬達。你可以告诉它把轴转到哪个位置。
在类似 iDryer 的設備中,伺服馬達可以打开風門、移動小锁扣、按下機械開關,或改变氣流方向。
伺服馬達的主要錯誤是:把它当成“小东西”,以为可以从控制器任意 5V 腳位供電。伺服馬達可能消耗很大電流,尤其是在啟動、突然動作或機構卡住时。
三條線¶
典型 hobby servo 有三條線:
- 電源:通常是
5V或6V; - 地:
GND; - 訊號:来自控制器的控制脈衝。
常见顏色:
- 紅色 - 電源;
- 黑色或棕色 - 地;
- 黃色、橙色或白色 - 訊號。
但不能盲目信任顏色。不同廠商可能使用不同配色。連接前,请檢查標示、產品頁面或 datasheet。
電源分开,訊號分开¶
訊號线不给伺服馬達供電。它只告诉伺服馬達转到哪里。
伺服馬達从電源线取得能量。
正確邏輯是:
- 控制器只提供控制訊號;
- 伺服馬達由能承受其電流的 5V/6V 電源供電;
- 控制器地和伺服馬達電源地連接在一起。
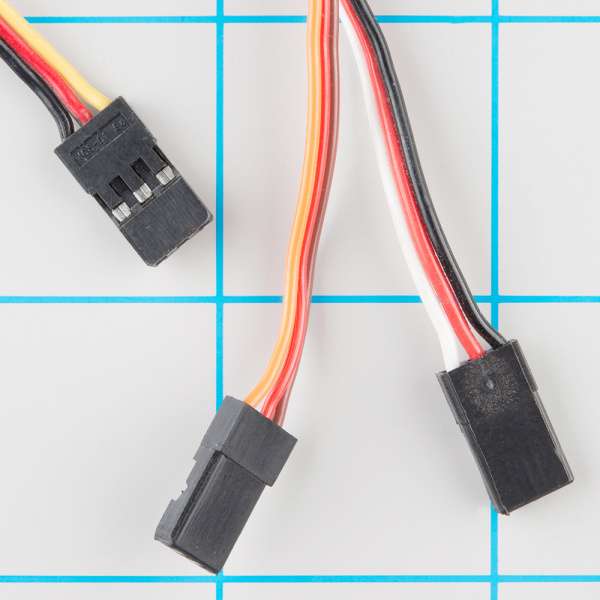
來源:SparkFun Electronics, CC BY-SA 4.0
為什麼不能从弱 5V 供電¶
許多板子都有 5V 腳位。这不表示可以安全地从它给伺服馬達供電。
伺服馬達運動时消耗的電流可能远大于它的尺寸暗示。如果電源不足,常见症狀包括:
- 控制器重置;
- 螢幕閃爍;
- USB 連接斷開;
- 伺服馬達抽動;
- ESP32 的 Wi-Fi 斷線;
- 伺服馬達嗡嗡响但不移動;
- 動作開始时電源下陷。
一个小伺服馬達有时可以由板載電源供電,前提是板子和電源明確支持该電流。但在带風門、锁扣或機構的真實設備中,最好使用带餘量的獨立 5V/6V DC-DC 或電源。
共地¶
如果伺服馬達由獨立電源供電,就需要共地。
没有共地时,控制器和伺服馬達没有共同訊號參考電平。伺服馬達可能不回應、抽動或隨機動作。
簡單連接:
- 電源的
+5V或+6V接伺服馬達電源。 - 電源的
GND接伺服馬達地。 - 控制器
GND接到同一个地。 - 控制器 PWM/GPIO 腳位接伺服馬達訊號线。
伺服馬達電源和控制器電源可以不同,但地必須共用。
需要什么訊號¶
典型位置伺服馬達由脈衝控制。
典型訊號:
- 大约每
20 ms一个脈衝; - 约
1 ms- 行程一端; - 约
1.5 ms- 中間; - 约
2 ms- 行程另一端。
这不是用于 LED 亮度或风扇速度的普通 PWM。这里重要的是微秒级脈衝寬度。
具体伺服馬達的實際極限可能不同。有些伺服馬達安全範圍不是 0 到 180 度,而更小。因此極限位置需要謹慎測試。
不要让伺服馬達頂住機構¶
伺服馬達会嘗試保持命令位置。
如果風門碰到外殼、連桿卡住,或機構在命令结束前到达物理限位,伺服馬達会繼續推。此时電流升高,馬達發熱,齒輪箱磨損。
这对風門和锁扣尤其重要。
長期運行前確認:
- 機構在整個範圍内能自由移動;
- 没有錯位;
- 連桿不卡住;
- 伺服馬達在終點位置不嗡嗡响;
- 韌體中的極限角度不会把機構顶到限位;
- 斷電时設備仍安全,或按設計由彈簧復位。
如果伺服馬達靜止时嗡嗡响,通常表示有負載、顶到限位或槓桿几何錯誤。
啟動電流和堵转電流¶
伺服馬達有正常運行電流,也有轴被卡住时的電流。后者通常叫 stall current。
当伺服馬達嘗試運動但轴被卡住,或機構太重时,会出现堵转電流。
这种模式常导致:
- 電源下陷;
- 控制器重置;
- 導線發熱;
- DC-DC 过热;
- 齒輪箱損壞。
如果 datasheet 列出 stall current,选择電源时要按该值和安全餘量計算。如果没有 datasheet,就不能凭感觉认为伺服馬達安全。
伺服馬達旁的電容¶
有时在伺服馬達旁边的 +5V 和 GND 之间加一个電解電容会有帮助。
它不能取代合適電源,但可以緩和動作開始时的短暫下陷。
对于小伺服馬達:几百微法,例如 470 uF 或更大,耐壓高于供電电压。
電解電容有極性:
- 電容正极接
+5V; - 電容负极接
GND。
如果設備需要可靠,先选择正確電源和接线,再把電容作为額外措施。
Klipper 設定範例¶
在 Klipper 中,伺服馬達用 [servo] 段描述。
範例:
[servo chamber_damper]
pin: PA8
maximum_servo_angle: 180
minimum_pulse_width: 0.001
maximum_pulse_width: 0.002
initial_angle: 90
命令:
SET_SERVO SERVO=chamber_damper ANGLE=0
SET_SERVO SERVO=chamber_damper ANGLE=90
SET_SERVO SERVO=chamber_damper ANGLE=180
这里的腳位名只是典型範例。真實設備中,请檢查板卡 pinout。
对于機械部分,不要一開始就用 0 和 180。先測試安全範圍,例如 60、90、120,然后再擴大角度。
Arduino/ESP32 邏輯範例¶
Arduino 方式通常使用 Servo 函式庫:
#include <Servo.h>
Servo damper;
void setup() {
damper.attach(9);
damper.write(90);
}
void loop() {
}
这只是訊號邏輯範例。伺服馬達電源仍需要單獨設計。即使訊號线連接到 Arduino 或 ESP32,伺服馬達馬達也不能让控制器電源過載。
連接后要檢查什么¶
安裝到外殼前:
- 伺服馬達取得正確电压;
- 電源能承受伺服馬達電流;
- 控制器地和伺服馬達地共用;
- 訊號线接到正確腳位;
- 伺服馬達運動方向正確;
- 極限角度不会損壞機構;
- 機構不卡住;
- 伺服馬達不持續嗡嗡响;
- 導線不会被搖臂或齒輪挂住;
- 動作后電源不下陷;
- 控制器不重置。
在無負載和真實負載下測試機械結構。手动移動很轻松的風門,装进外殼后可能会卡住。
常見錯誤¶
- 从 GPIO 给伺服馬達供電;
- 从板子弱 5V 腳位给伺服馬達供電;
- 忘記共地;
- 不檢查就相信線色;
- 電源接反;
- 使用過細導線;
- 没有計算啟動和堵转電流;
- 強迫伺服馬達推機械限位;
- 真實機構只在較小範圍安全,却使用角度
0或180; - 把伺服馬達装在熱源附近却不檢查工作溫度;
- 把連續旋轉伺服馬達当普通位置伺服馬達使用。
要點¶
- 伺服馬達有三條線:電源、地、訊號。
- 訊號不给伺服馬達供電。
- 真實設備通常需要獨立 5V/6V 電源。
- 伺服馬達地和控制器地必須共用。
- 最危险的負載是卡死或機械卡住。
- 極限角度需要謹慎选择,不能直接用
0和180。 - 如果伺服馬達動作时控制器重置,先檢查電源和共地。
相關閱讀¶
- Klipper Configuration Reference: Servo - 官方
[servo]段、SET_SERVO、角度和脈衝寬度。 - SparkFun: Hobby Servo Tutorial - hobby servo、三條線和脈衝控制的基本說明。
- SparkFun: Servo Trigger Hookup Guide - 电气連接、常见線色和 hobby servo 機械結構說明。
- Adafruit: Arduino Lesson 14. Servo Motors - 連接、電源下陷行为和伺服馬達旁電容的实用範例。
- Arduino Servo Library Reference - Arduino 方式的官方 Servo 函式庫。