Klipper: Firmware-Installation¶
Auf dieser Seite wird die Installation der Klipper-Firmware auf den iDryer Unit-Controller (MCU auf RP2040) beschrieben.
Die Firmware-Installation erfolgt in zwei Schritten:
- Installation des Bootloaders Katapult — ermöglicht die Neuprogrammierung von Klipper über USB ohne Eintritt in den BOOT-Modus.
- Installation von Klipper über Katapult.
Anforderungen¶
- Host mit installiertem Klipper (Raspberry Pi oder ähnlich).
- USB-Datenkabel.
- SSH-Zugriff auf das Host-Terminal.
Teil 1: Katapult-Installation¶
1. Umgebung vorbereiten¶
Stellen Sie sicher, dass das System aktualisiert ist, und installieren Sie die Abhängigkeiten:
sudo apt update
sudo apt install git build-essential gcc-arm-none-eabi libnewlib-arm-none-eabi \
libstdc++-arm-none-eabi-newlib cmake python3 python3-pip python3-serial \
usbutils dfu-util
2. Katapult herunterladen¶
3. Build-Konfiguration¶
Wählen Sie die Parameter gemäß dem Screenshot:
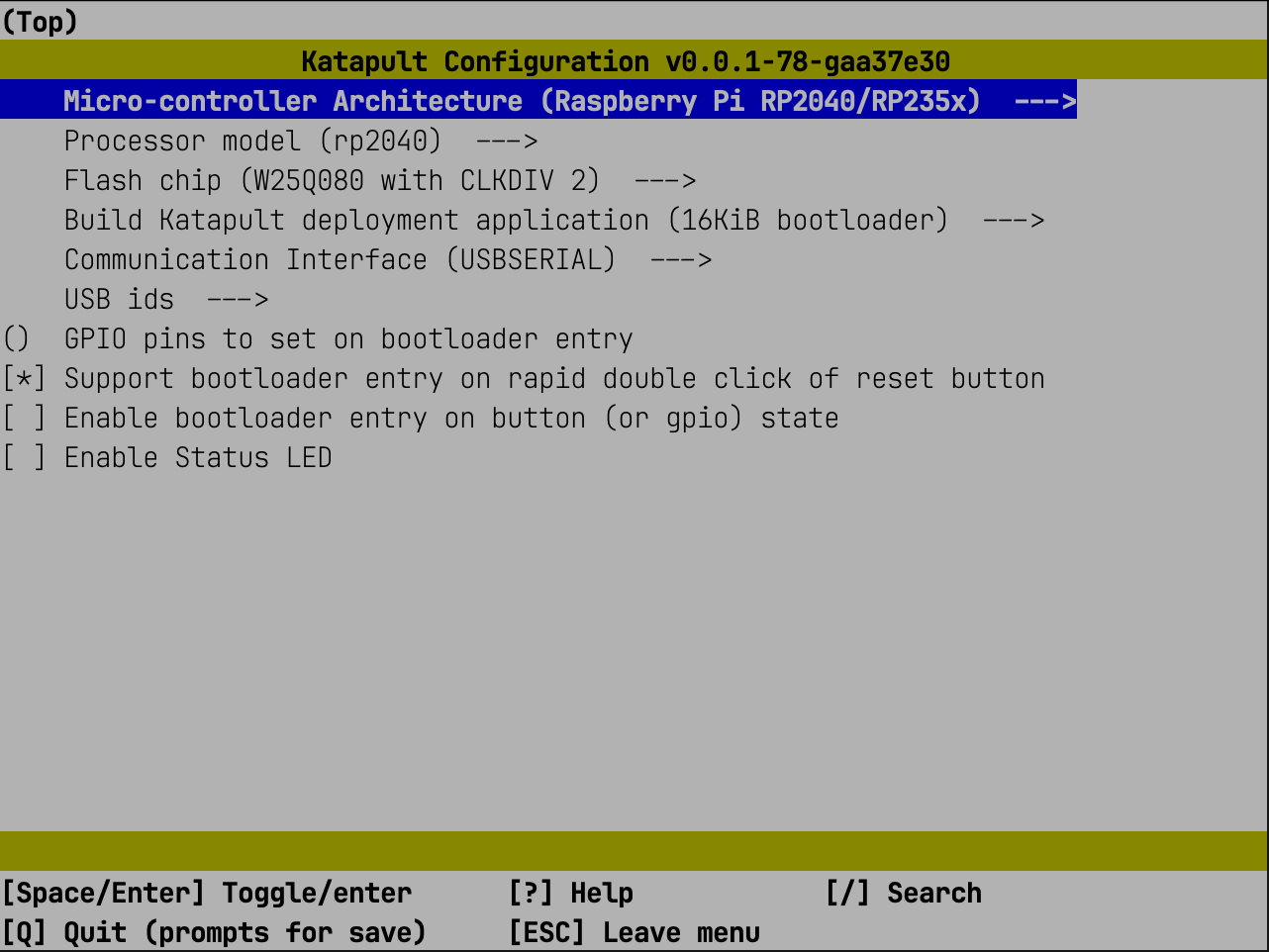
Wichtig
Stellen Sie sicher, dass die Konfiguration korrekt gewählt ist. Das Überschreiben des Bootloaders mit einem fehlerhaften Build führt zur Funktionsunfähigkeit des Geräts – für die Wiederherstellung ist ein Programmierer erforderlich.
4. Kompilieren¶
5. Controller in den BOOT-Modus versetzen¶
Führen Sie eines der folgenden Verfahren durch:
- Halten Sie
BOOTgedrückt, verbinden Sie USB, lassen SieBOOTlos (bei USB-Trennung). - Halten Sie
BOOTgedrückt, drücken SieRESETkurz, lassen SieBOOTlos.
6. USB-ID des Controllers bestimmen¶
In der Ausgabe wird eine Zeile wie diese angezeigt:
7. Katapult programmieren¶
Teil 2: Klipper-Installation¶
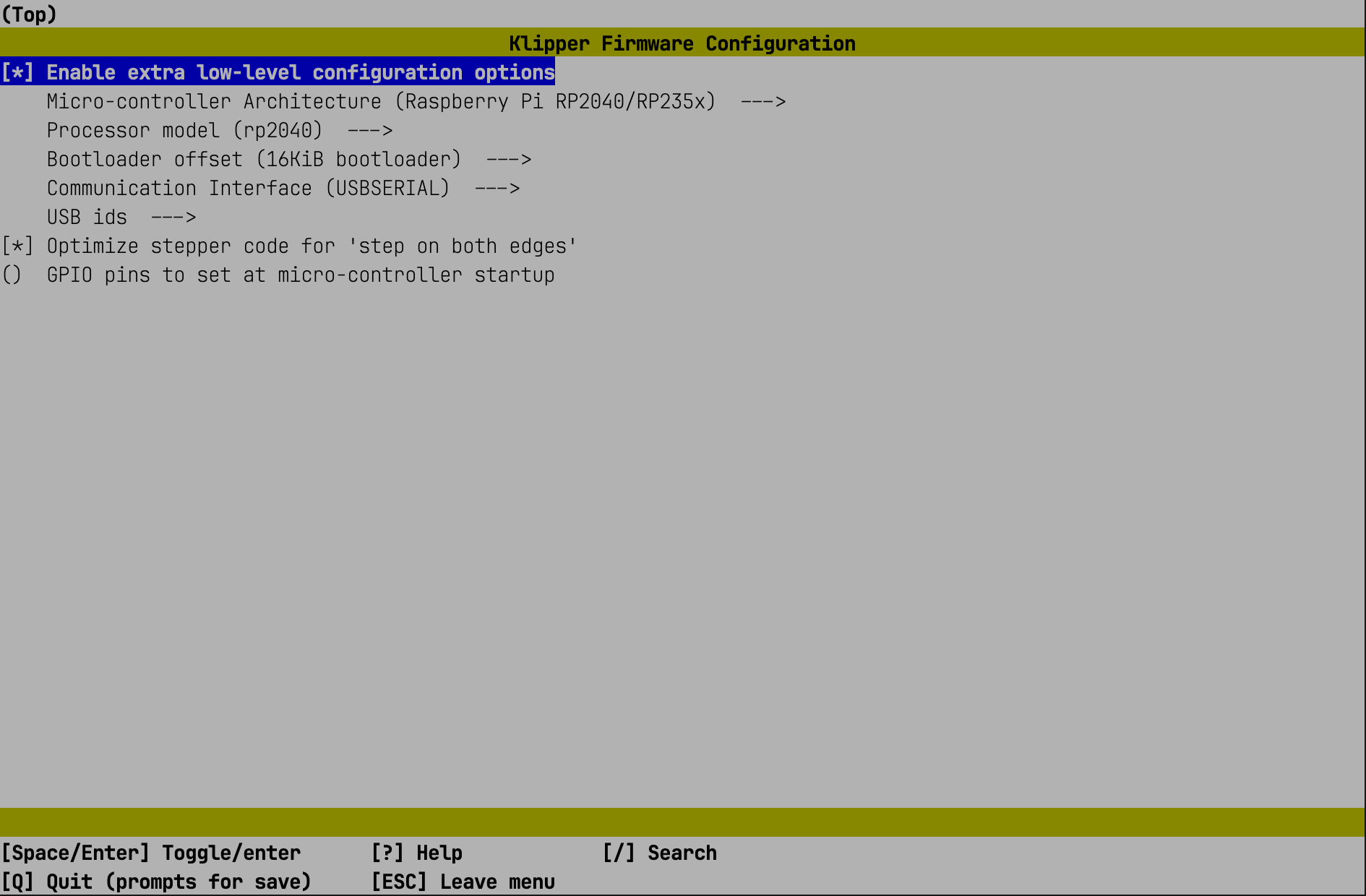
8. Klipper Build-Konfiguration¶
Wählen Sie die Parameter gemäß dem Screenshot:
9. Klipper kompilieren¶
10. Python-Bibliothek installieren¶
11. Serielle ID bestimmen¶
Verbinden Sie USB neu oder drücken Sie RESET, warten Sie auf das Gerät:
Erwartetes Ergebnis:
12. Klipper über Katapult programmieren¶
cd ~/katapult/scripts
python3 flashtool.py -d /dev/serial/by-id/usb-katapult_rp2040_XXXXXXXXXXXXXXXX-XXXX
13. Ergebnis überprüfen¶
Bei erfolgreicher Programmierung enthält die Geräte-ID Klipper:
Nächster Schritt¶
Installation der iDryer-Konfigurationsdateien – Abschnitt «Konfiguration».